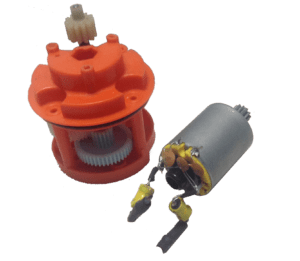
L’automatismo del cancello automatico è controllato dal PIC16F876A. Questo sistema è dotato di un controllo di potenza relativa al pilotaggio del motore e di sensori per la sicurezza degli utenti e dell’apparecchiatura. I sensori includono i finecorsa che bloccano il movimento del cancello in fase di completa apertura e chiusura e un sistema ottico (fotocellula) per il rilevamento di ostacoli durante il moto di chiusura. Infine un indicatore luminoso avvisa che il dispositivo è in movimento. Per il movimento del cancello abbiamo utilizzato un motore in corrente continua da 7V che assorbe 800mA sul quale è installato un motoriduttore di tipo meccanico, che permette di ridurre i giri del motore in una prima fase, e in un secondo momento saranno ulteriormente ridotti tramite il controllo di velocità in PWM. L’accoppiamento meccanico tra motore e cancello è di tipo pignone e cremagliera.
Finecorsa

I finecorsa, a volte detti micro interruttori, sono dei pulsanti in cui l’azione è fornita dalla meccanica stessa e non da un operatore. Questi hanno un’azione monostabile, ovvero una volta rilasciati ritornano autonomamente nella situazione stabile.
I finecorsa installati hanno tre terminali:
- comune
- contatto normalmente aperto
- contatto normalmente chiuso
E’ molto importante il fatto che i finecorsa, dovranno essere cablate in normalmente chiuse perché’ risulta’ già essere un primo livello di protezione. Se un finecorsa, cablato N.C. dovesse scablarsi a causa ad esempio dello strappo del cavo il segnale che arriva al sistema di controllo è il medesimo dell’intervento. Ovviamente il ciclo non va a buon fine, ma sicuramente la situazione non ho lo stesso livello di pericolosità.
Come anche i pulsanti precedentemente usati i finecorsa sono stati inseriti con delle resistenze di pull-down per assicurare una stabilità del sistema.
La segnalazione Lampeggiante
La segnalazione avviene tramite un LED di colore giallo. L’azione preavvisa gli utenti del movimento e di allontanarsi dalla zona di azione con un anticipo di almeno 3 secondi. Le uscite digitali del PIC sono in grado di pilotare carichi con ben 20 milliampere, quindi saranno in grado di pilotare un semplice LED. Risolvendo l’equazione per 10mA $R_{D}=\frac{V_{OHmin}-V_{led}}{0,01}$ si ottiene a resistenza di limitazione della corrente di 330Ω.
Fotocellula
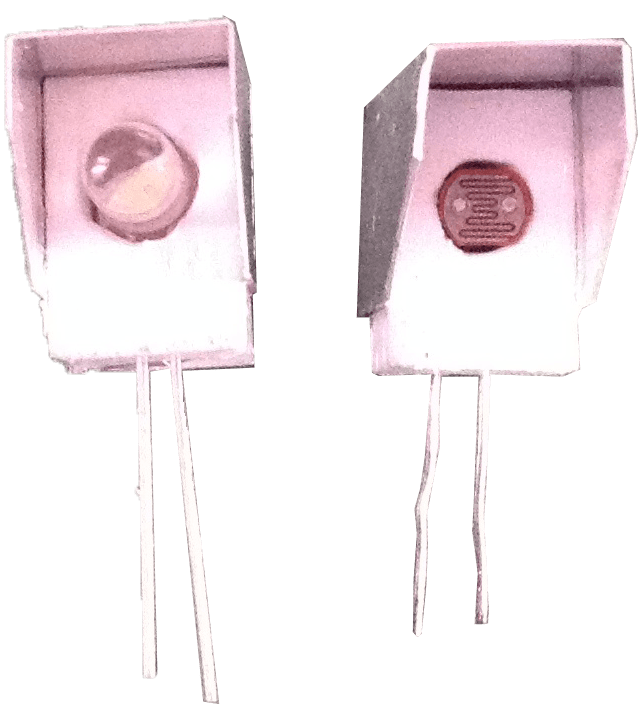
La fotocellula è divisa in due parti, un trasmettitore e un ricevitore. La prima è simulata con un diodo ad alta emissione il cui fascio è ristretto utilizzando un tubicino in plastica, mentre nel ricevitore si è usata una fotoresistenza. Tramite un circuito, rileviamo l’interruzione del fascio luminoso nel caso in cui un oggetto si trovi posizionato sulla corsa del cancello. Questo circuito utilizza un amplificatore operazionale (LM358), privo di reazione (anello aperto) che si comporta da comparatore.
Come sappiamo quando ci troviamo in configurazione ad anello aperto viene sfruttato il guadagno massimo dell’amplificatore, che porterà l’uscita in soli due stati possibili, la saturazione positiva oppure alla saturazione negativa o a zero volt se l’alimentazione è singola. A determinare quali dei due casi sarà presente in uscita sarà la logica di comparazione
- se V+ > V- -> Vo = Vcc
- se V- > V+ -> Vo = -Vcc/0
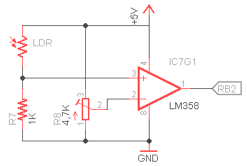
Schema circuito fotocellula
Osservando lo schema notiamo che le tensione agli ingressi del comparatore sono prelevate da due partitori resistivi, uno fisso creato con la posizione del trimmer da 10K e uno composto da un elemento resistivo stabile da 1K e un altro dipendente dalla luce esterna, ovvero la fotoresistenza già discussa precedentemente.

L’usicta del comparatore è stata collegata direttamente al pin 2 della PORTB in quanto l’uscita del comparatore può avere solo due livelli logici 0V o 5V (a meno di qualche caduta interna dell’integrato). Quando il fascio viene interrotto abbiamo un uscita bassa, quando nessuno impegna il passaggio è alta. Il LED ad alta emissione è stato collegato direttamente ad un pin del PIC tramite una resistenza limitatrice e sarà attivo solo in fase di chiusura del cancello.
Circuito di potenza e direzione motore
Per pilotare il motore abbiamo usato due pin del PIC uno per l’avvio e un altro per la direzione di marcia.
Per l’avviamento è stato usato un transistor di potenza del tipo TIP121 capace di sopportare una corrente massima di 5A. Per portare alla completa saturazione il BJT, ho utilizzato un ulteriore transistor BC337 collegato in configurazione Darlington. Così facendo il PIC erogherà una piccolissima corrente per saturare il TIP121.
La marcia del motore è gestita invece da un relè a doppio scambio e bobina a 12V. Il funzionamento è il seguente:
- quando è in fase di riposo, ovvero segnale del PIC = 0, in base ai collegamenti effettuati tra i piedini del relè abbiamo che un contatto è a massa e l’altro a Vcc, così facendo la corrente fluisce in un verso.
- nel momento in cui il PIC invia un segnale alto ed eccita la bobina del relè, la posizione degli scambi si sposta in modo opposto a come erano in precedenza. Così facendo il contatto che prima era a massa ora è su Vcc e quello che stava su Vcc è a massa. Ora la corrente circola nel verso opposto facendo girare il motore nella direzione inversa.
Anche il relè avendo una bobina a 12V e una corrente di eccitazione di 60mA ha bisogno di un’interfaccia di potenza per essere pilotato. Siccome la corrente in gioco non è eccessivamente elevata, differentemente dal motore, usiamo un solo transistor BC337.
Infine non mancano i diodi di riciclo sia sulla bobina che sul motore in quanto essendo carichi induttivi creano delle extra-tensioni.
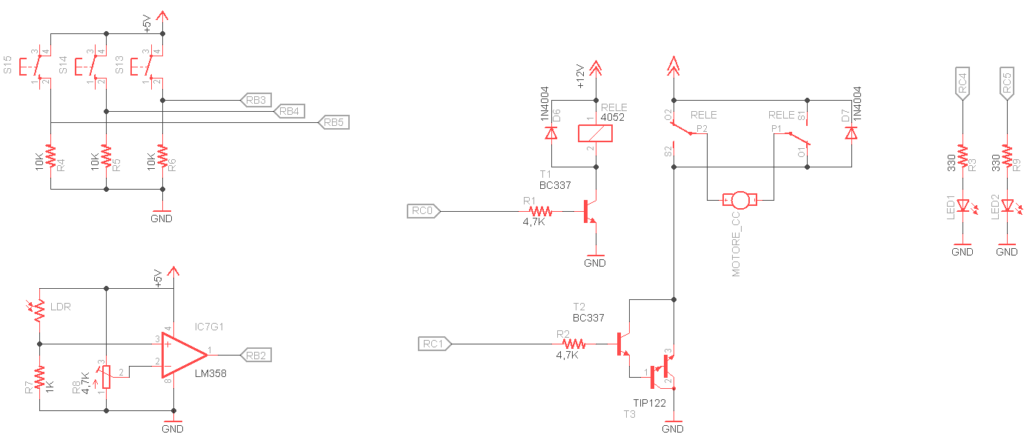
Schema elettrico per il circuito di potenza e direzione del motore
Controllo PWM
Per un’ulteriore regolazione della velocità del motore, oltre a quella effettuata dal riduttore meccanico, abbiamo pilotato il motore usando la tecnica PWM.
Un segnale PWM (Pulse Width Modulation, ovvero modulazione a variazione di larghezza d’ impulso) è un’ onda quadra di duty cycle variabile che permette di controllare l’ assorbimento (la potenza assorbita) di un carico elettrico (nel nostro caso il motore DC). Tra i parametri caratteristici degli impulsi PWM c’è il periodo T, che rimane costante, e il duty cycle d, che viene variato durante la modulazione.
Il periodo T rappresenta l’intervallo di tempo che intercorre tra un impulso e l’altro, mentre il duty cycle quantifica l’ampiezza dell’impulso in rapporto al periodo, quindi:
$$DutyCicle = \frac{T_{ON}}{T}$$
TON rappresenta il tempo che l’impulso rimane a livello alto. Si capisce che TON risulterà sempre minore o uguale al periodo. Spesso il duty cycle viene espresso in percentuale.
In Figura possiamo vedere diversi impulsi di ugual periodo ma con diverso Duty Cycle. Nel caso il segnale PWM venga generato per mezzo di microcontrollori, un altro parametro caratteristico è rappresentato dal numero di bit con il quale viene generato. Se per esempio il numero di bit è 8, il periodo T verrà suddiviso in 256 intervalli. La durata di un intervallo è calcolata facendo il rapporto tra il periodo T e il numero di intervalli. Per mezzo del periodo si ricava la frequenza che caratterizza il segnale PWM attraverso il seguente calcolo: generalmente le frequenze utilizzate vanno da 1KHz a 200KHz
L’onda rettangolare in uscita è il segnale con cui viene effettivamente pilotati i bjt bc337 e a sua volta il tip121. Questa tecnica permette di modificare la velocità pur assicurando un rendimento energetico elevato.
All’interno del PIC16F876A sono presenti due moduli chiamati CCP1 e CCP2 in grado di svolgere tre funzioni differenti: Capture, Compare e PWM. La funzione PWM è in grado di generare un segnale impulsivo, dove è possibile impostare appunto la frequenza e il Duty Cicle.